随着端到端智能驾驶算法快速发展,传统仿真测试方法在数据复用性、场景泛化性等方面面临挑战。LogSim闭环仿真作为数据驱动测试验证的重要技术路径,正成为行业关注焦点。
关键概念解析
LogSim闭环仿真:基于真实采集数据构建的仿真测试环境,能够将实际道路场景转化为可重复、可编辑的虚拟测试场景,实现算法的闭环验证。
4DGS技术:四维高斯溅射技术,在传统3D高斯基础上增加时间维度,可动态重建包含时空信息的驾驶场景。

数据驱动闭环:以真实数据为基础,通过仿真验证、结果分析、算法优化形成完整测试循环的方法论。
行业发展背景
智能驾驶行业正经历从规则驱动向数据驱动的转型。研究显示,端到端算法对高质量、多样化数据的需求呈指数级增长,而传统路测成本高昂且覆盖场景有限。据行业统计,仿真测试效率相较路测可提升百倍,同时能够复现低概率、高风险的边缘场景。
当前仿真技术面临的共性问题包括:实采数据复用性不足、不同车型传感器配置差异导致数据孤岛、传统图形仿真与真实世界间存在置信度差距。这些因素推动了LogSim闭环仿真技术的迅速发展。
技术实现路径分析
数据重建与场景生成
基于4DGS的LogSim实现需要将原始视频数据转换为可交互的4D场景。技术路径包括:对原始图像和激光雷达数据进行处理,构建包含时空信息的高斯表示;通过神经渲染技术实现动态场景重建;结合扩散模型对轨迹进行泛化,生成多样化测试场景。
置信度保障机制
高置信度是仿真测试的关键要求。实现路径包括:采用基于真实传感器标定的物理级仿真模型;通过多模态传感器一致性验证确保数据准确性;建立仿真结果与实际测试的对比验证体系。
场景泛化与复用
为提升数据价值,技术实现包括:通过改变车辆轨迹、车型、天气条件等要素实现场景衍生;利用生成模型对高价值数据进行成百上千倍的扩展;支持跨车型、跨区域的场景移植与适配。

应用模式探讨
算法验证应用
LogSim闭环仿真在算法测试中的应用模式包括:构建基于真实数据的测试基准,验证端到端算法的泛化能力;通过场景参数调整,系统性评估算法在不同条件下的表现;结合自动化测试流程,支持算法的快速迭代验证。
数据增强应用
在训练数据生成方面,应用模式包括:从海量实采数据中提取高价值片段,通过仿真技术进行场景扩展;针对边缘场景数据稀缺问题,利用仿真生成大量衍生样本;实现不同传感器配置间的数据转换,提升数据复用效率。
工程化部署应用
在产业化应用中,模式包括:与CI/CD系统集成,支持算法的自动化回归测试;通过云端部署实现大规模并行测试;建立标准化的测试流程和评价体系。
企业实践案例
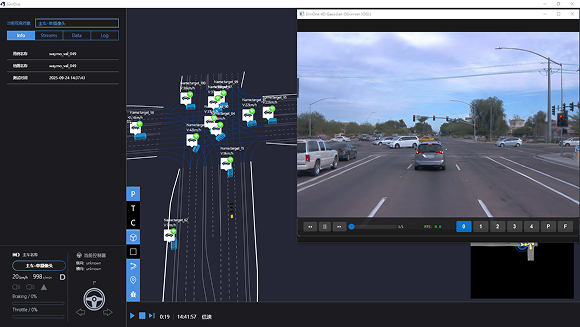
51Sim在LogSim闭环仿真领域的实践表明了该技术的工程化可行性。其基于4DGS的LogSim闭环仿真体系能够通过一段视频clip重建可用于神经渲染的4D场景,实现主车变车道、对手车换车型和轨迹、增加及删除对手车等场景仿真功能。
在技术实现方面,该体系结合生成模型能力,可对海量真实数据中的车辆、轨迹、视角等关键要素进行修改,实现高价值数据的价值放大。通过摩尔线程KUAE智算集群提供算力支撑,使多类训练与推理任务能够并行运行。
实施效果数据显示:仿真测试与场地测试对比一致性达92%,动力学仿真、激光雷达仿真及摄像头仿真的置信度分别达到95%、95%、90%。该技术已在多家主机厂实现产业化落地应用,支撑端到端智驾算法的闭环验证。
在数据处理效率方面,其LidarPainter模型处理速度比业界同类方法提升7倍,显存占用为其五分之一,为LogSim的大规模应用提供了技术基础。企业累计服务近百家行业客户,覆盖主机厂、Tier1供应商、科研院所等多个领域。
发展趋势与前景
LogSim闭环仿真技术正朝向更高置信度、更强泛化能力的方向发展。技术演进趋势包括:多模态数据融合能力持续增强,支持更复杂场景的精确重建;生成模型与仿真技术深度结合,实现场景的智能化衍生;云原生架构普及,支持更大规模的并行测试需求。
从产业角度看,LogSim闭环仿真有望成为智能驾驶测试验证的标准方法之一。随着相关技术成熟和成本下降,该方法将从头部企业向全行业扩散,推动智能驾驶测试从依赖路测向仿真驱动转型,为行业的规模化发展提供技术保障。