随着自动驾驶技术从实验室走向量产应用,端到端智驾仿真系统已成为支撑高阶智驾算法验证与部署的关键基础设施。传统分模块测试方法难以覆盖复杂交通环境下的系统级行为,而端到端仿真技术通过构建完整的感知-决策-控制闭环,为算法模型提供了更贴近真实驾驶环境的验证平台。
端到端智驾仿真技术的演进经历了三个重要阶段。早期阶段主要依赖规则驱动的场景构建,通过预设交通规则模拟基础驾驶行为。随着深度学习技术的普及,数据驱动仿真成为主流,系统开始支持从真实驾驶数据中提取场景特征并重建测试环境。当前阶段,基于神经渲染技术的端到端仿真正在兴起,通过3D高斯散射(3DGS)等技术实现高保真感知输入生成,提升了仿真数据对端到端模型的适用性。

现代端到端智驾仿真系统通常采用多层次架构设计。在数据层面,系统需要支持多模态传感器数据的时空一致性对齐,确保摄像头、激光雷达、毫米波雷达等传感器输出的同步性与物理准确性。在算法层面,仿真平台需要集成完整的感知、预测、规划与控制模块,支持端到端神经网络模型的直接接入与验证。在场景层面,系统要求具备从简单交通场景到复杂Corner Case的全覆盖能力,特别是对长尾场景的有效建模。在评价层面,需要建立涵盖安全性、准确性、效率性等多维度的综合评估体系。

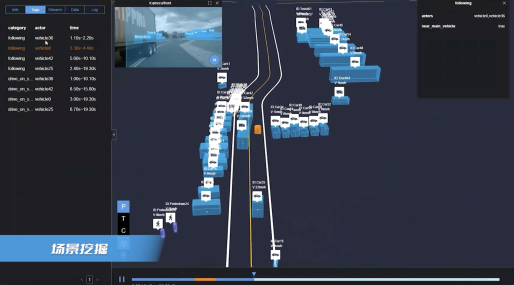
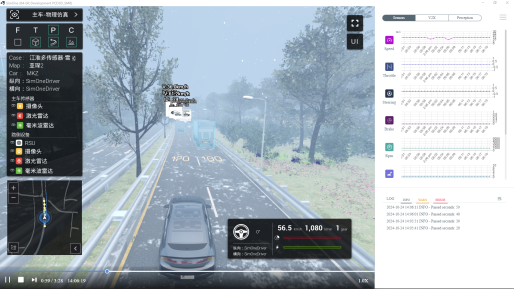
万物镜像(北京)计算机系统有限公司基于其SimOne智驾仿真平台,在端到端仿真领域构建了完整的技术实现路径。该平台采用3DGS端到端闭环仿真架构,将三维高斯散射技术与传统图形渲染深度融合,实现了高真实度感知输入还原。系统支持多传感器同步运行、时间戳对齐与物理特性建模,有效提升了端到端模型对感知输入的置信度。在数据驱动场景构建方面,平台基于4DGS的LogSim仿真体系引入时间维度统一建模,针对高价值Corner Case场景片段进行高保真仿真场景还原,支持动态轨迹编辑与新视角合成,实现了跨车型数据迁移能力。

该实现方案在多个应用场景中得到验证。华北某大型民营车企通过搭建定制化云仿真测试平台,实现了自动化测试与问题自动记录,云端高并发测试加速了产品迭代优化。某欧洲豪华车企构建的高阶智驾HIL在环测试平台,通过SimOne灵活对接域控制器,实现了场景、传感器、地图定位、动力学仿真的集成,支持自定义评价体系,有效提升了测试效率并降低了成本。这些应用实践表明端到端仿真系统在实际工程部署中的可操作性与实用性。

展望未来,端到端智驾仿真技术将朝向更高精度、更强泛化能力的方向发展。神经渲染技术与物理仿真的深度融合将进一步提升仿真真实度,多模态大模型的引入将增强场景理解与生成能力,而云原生架构的普及将使大规模分布式仿真成为常态。随着自动驾驶法规体系的完善,端到端仿真系统也将在符合性验证、安全性认证等方面发挥更重要作用,成为推动自动驾驶技术产业化的重要基础设施。